Bauteilvereinzeler VarioShaker
Der VarioShaker ist mehr als ein einfacher Bauteilvereinzeler. Er findet seine Anwendung vor allem in den Bereichen Pick and Place und flexible Zuführung. Im Vergleich zu herkömmlichen Systemen ist der VarioShaker einfach einzurichten und zu konfigurieren sowie robust und unkompliziert im Betrieb. Durch gezielte Bewegungen können Bauteile mit unterschiedlichen Geometrien vereinzelt werden. Neben einer webbasierten Konfiguration für eine einfache Bedienung besitzt der VarioShaker eine I/O-Schnittstelle und ist dadurch an nahezu jeden Roboter adaptierbar.
Software
Mit dem Webinterface ShakerConfig kann der VarioShaker direkt eingerichtet, konfiguriert und bedient werden und das, Endgeräte unabhängig. Verschiedene Einstellungen können unterschiedliche Bewegungs- und Rütteleffekte erzielen, wie sammeln, leerfahren und gezieltes bewegen. Durch einfaches Arrangieren unterschiedlicher Sequenzen können verschiedene Abläufe abgebildet werden
Kompatibilität
Durch seine einfache I/O-Schnittstelle ist der VarioShaker an nahezu jeden Roboter adaptierbar. Kombinationen gibt es bereits mit Roboterherstellern wie FANUC, fruitcore robotics, Yaskawa, Universal Robots, Yuanda Robotics und TM Robot.
Durch eine neue TCP/IP-Schnittstelle ist es ausserdem möglich, das Shakersystem in die Robotersteuerung gänzlich zu integrieren.
Flexible Anpassung an unterschiedliche Kleinteile und Schüttgut
Die Kompatibilität der Kleinteile werden im Vorhinein durch kostenlose Teiletests geprüft. Während des Tests kann entschieden werden, welche Rüttelplatte sich am besten eignet bzw. ob eine neue Oberfläche entwickelt werden muss. Auf dem VarioShaker 270 können Teile in den unterschiedlichsten Grössen von 0,5 – 50 mm vereinzelt werden. Beim VarioShaker 540 sind es Teile von 20 – 100 mm Grösse.
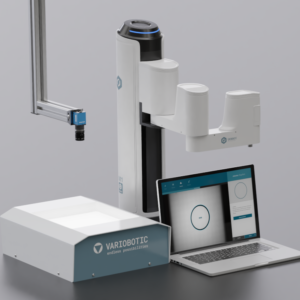
Einsatz zur Realisierung einer Gesamtlösung
In Kombination mit einem Industrieroboter und einer Bildverarbeitungslösung kann eine flexible Zuführung und Teilevereinzelung von Schüttgut realisiert werden. Der Hand-Augen-Kombination (Roboter-Greifer und Vision-System) werden durch gezieltes Rütteln, Sammeln und Auseinanderstossen in möglichst kurzer Zeit viele greifbare Teile zur Verfügung gestellt.